ros2中文指南.pdf
标签: ROS2 AI
ROS2开发中文指南,ROS开发必备。ROS2是新的ROS版本。相对与旧版本更加接近工业化场景,更加稳定,同时功能也更加丰富。
标签: ROS2 AI
ROS2开发中文指南,ROS开发必备。ROS2是新的ROS版本。相对与旧版本更加接近工业化场景,更加稳定,同时功能也更加丰富。
为了提高开发效率,可以先安装集成开发工具和使用方便的工具,本教程用VSCode搭建ROS2工程环境
标签: C++
ROS2 在AIIT-PKU学习LAIR的ROS2和ROS2工作区
对于初学ROS的同学,如果没有有效的学习规划,那么不妨看看该文,在这里,我们将对ROS2出现的知识板块进行介绍,期望对初识ROS2的同学起到导航作用。
友情提示:如果您是2019年接触机器人操作系统ROS,可以忽略ROS1.0时代的教程,直接学习ROS2.0。 技术更新迭代速度是非常快的,工具如此,算法也是如此,就如同如今很少有人会选择购买功能机(对比智能机)一样。 ...

人工智能机器人编程,开发机器人应用实现机器人颜色识别功能,并对特定人员进行跟踪。代码亲测有效。针对于人工智能初学者示例,实现了地面移动、机器人仿真平台Stage,并在实际环境中开发试验。可以学习到机器人2.5...



一起学ROS+AI 开篇 ros部署yolov8
ROS2通过自带rosidl_default_generators包来为自定义的msg、srv和action文件生成各个语言的头文件!ROS2通过在CMakeLists.txt中调用新增的宏rosidl_generate_interfaces来为msg、srv和action文件生成各个语言的...

ROS1到ROS2迁移教程(以rslidar_to_velodyne功能包为例)+ ROS2版本LIO-SAM试跑
ros2 wsl2 ubuntu22.04
激光雷达和3d视觉传感器驱动很多都是基于ros1开发的,由于自己项目在ros2环境开发,需要获取从驱动出来的点云数据流,所以尝试订阅ros1出来的点云topic话题,固需要ros1与ros2之间建立通讯连接。3)开一个新终端,在...
ROS2入门的第一脚:总结了基本概念、名词解释、基础命令、基本编程(python)

在本教程中,您将学习如何在 ROS 2 系统中导航。此外,您将启动您的第一个 ROS 2 节点并创建您自己的 ROS 工作区以用于进一步的教程。您可以使用文档中的给定链接获取更多信息。
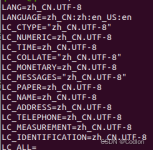
设置镜像源搞定,接下来执行这两个命令就完事啦。
ROS
目前已经在ROS1上跑通了全卷积点云神经网络基于caffe,需要将其全部转移到ROS2上去。这个功能包分为以下几个部分可以看出代码的结构层次还是很明显的,下面将一步步来介绍。
ros 人工智能 摄像头 校验 高清方格图 ros之摄像头标定校正。 里面有psd 文件,可以用photoshop,打开自己编辑自己要的大小,给的是源文件,还有一张gif 高清图。给有需要的朋友。谢谢
【代码】Ros2 学习04- ubuntu22.04 卸载 ros2。